Berlin Experimental Educational Satellite, Technischen Universität Berlin
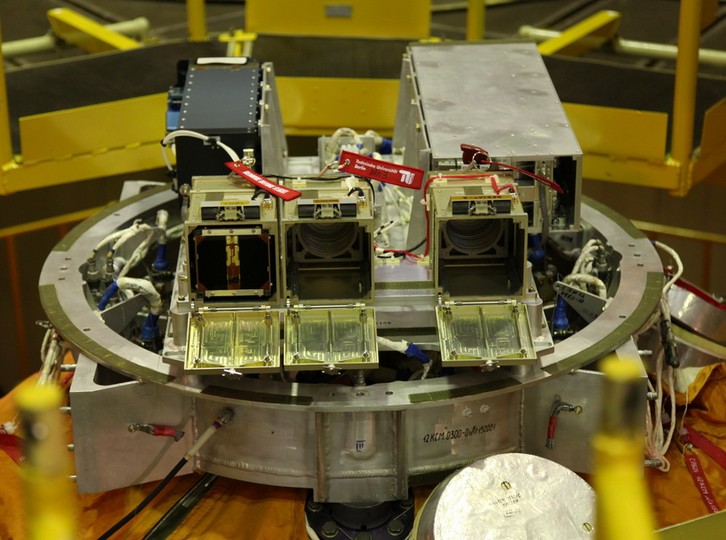
Der Start von Bion-M1 erfolgte am 19. April um 10:00 UTC mit einer Sojus-2 Rakete von Baikonour. Die CubeSats wurden allerdings erst am 21.04.2013 um 10:08 UTC in der Sonnenphase separiert. Bis dahin führte Bion-M1 Bahnmanöver durch, um in einen kreisförmigen Orbit mit 575 km Höhe zu gelangen.
NASA-Catalog: 39136
Downlink
435.950 MHz FM 4k8 GMSK 0.5W, Mobitex, CW Bake
Up- and downlink with picosatellites of the BEESAT series is established by half-duplex GMSK modulated narrow-band radio at 435.9500 MHz. The standard baudrate is 4800 bps but can be switched to 9800 bps for increased channel capacity at higher elevations. Each transmission at the higher baudrate is announced by a small 4800 bps header to allow for adaptive receiver re-configuration. The output power of the satellites is 27 dBm (0.5 W) using quarter-wave monopole antennas with toroidal radiation pattern.
Call
DP0BEF
Orbital Parameter
NORAD 39136 COSPAR designator 2013-015-G Inclination 64.871 RA of A. Node 178.873 Eccentricity 0.0015867 Argument of Perigee 328.847 Revs per day 15.02617917 Period 1h 35m 49s (95.82 min) Semi-major axis 6 937 km Perigee x Apogee 548 x 570 km BStar (drag term) 0.000681260 1/ER Mean anomaly 31.172
Audio
Mission
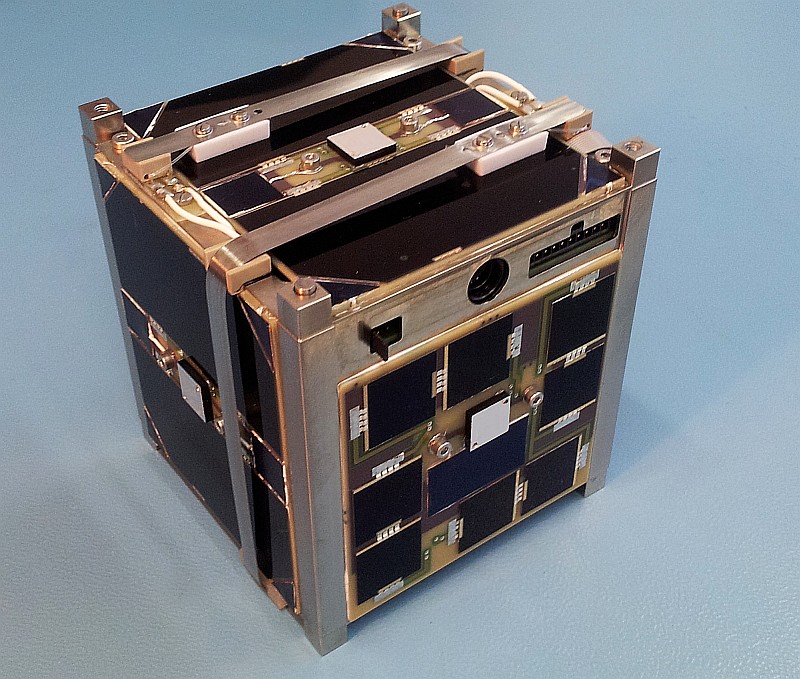
BeeSat ist ein Picosatellitenprojekt an der Technischen Universität Berlin. Hauptziel des Projektes ist die Weltraumverifizierung neu entwickelter, miniaturisierter Reaktionsräder und weiterer Technologien für Picosatelliten.
Mit der Bordkamera sollen Bilder von der Erdoberfläche gemacht und dann an die Bodenstation zur Auswertung gesendet werden. Sie dient außerdem als zusätzliches Mittel zur Verifizierung der Lageregelung. Es wird ein Sensor mit 640 mal 480 Pixeln eingesetzt, vor welchem ein Bayer Mosaik Filter sitzt. Die Farbtiefe beträgt 8 Bit pro Komponente und die Bilder werden mit einstellbarem Kompressionsgrad komprimiert.
Mit einer Kantenlänge von nur zehn Zentimetern und einer Gesamtmasse von einem Kilogramm enthält BeeSat neben drei Reaktionsrädern, die im Rahmen eines vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) geförderten Vorhabens in Kooperation mit der Industrie entwickelt wurden, weitere hoch entwickelte Baugruppen, die erstmalig im Weltraum eingesetzt werden sollen. Dazu zählt ein leistungsfähiger und redundanter Bordcomputer für Picosatelliten. Die umfangreiche Flugsoftware läuft auf einem vom Fraunhofer Institut für Rechnerarchitektur und Softwaretechnik (FIRST) bereitgestelltem Betriebssystem, das seit 2001 erfolgreich im Mikrosatelliten BIRD des DLR eingesetzt wird und für Picosatellitenanwendungen angepasst wurde.
Die Lageregelung von BeeSat nutzt neben den Reaktionsrädern ein hochintegriertes System aus neu entwickelten Sonnensensoren, Magnetfeldsensoren, Magnetspulen und Sensoren, die die Drehraten messen. Diese Komponenten werden durch eine aufwändige Lageregelungssoftware gesteuert, die zusätzlich die Bahnposition an Bord bestimmen kann. Damit ist es möglich, die Autonomie des Satelliten hinsichtlich der Kommunikation mit Bodenstationen zu erhöhen und den Betriebsaufwand zu senken.
Status
aktiv
Telemetrie

Links und weitere Informationen